
Siemens servo drive
یک درایو سرعت متغیر چیست؟
یک درایو سرعت متغیر (VSD=Variable Speed Drive) شامل یک موتور و نوعی کنترل کننده است.VSD ھای الکتریکی اولیه شامل ترکیبی از موتورھای AC و DC بود که به عنوان کنترل کننده ھای چرخشی استفاده می شد. اولین کنترل کننده ھای الکترونیکی از یک تریستور (SCR) یکسو کننده استفاده کردند که ولتاژ و در نتیجه سرعت موتور DC را کنترل می کرد. این DC VSD ھا ھنوز به طور گسترده ای مورد استفاده قرار می گیرند و قابلیت کنترل بسیار پیچیده ای را ارائه می دھند.با این حال، موتور DC بزرگ و گران است و نیاز به نگھداری دوره ای دارد. موتور القایی AC ساده، کم ھزینه و قابل اعتماد بوده و به طور گسترده در سراسر جھان استفاده می شود.برای کنترل سرعت موتور القایی AC، یک کنترل کننده پیچیده تر، معمولا به نام ” اینورتر ” مورد نیاز است.برای درک اینکه چگونه یک اینورتر کارمی کند، ضروری است تا بدانیم چگونه یک موتور القایی کار می کند.یک موتور القایی مانند ترانسفورماتور کار می کند. ھنگامی که استاتور (سیم پیچ خارجی ثابت ) به منبع تغذیه سه فاز وصل می شود، یک میدان مغناطیسی که در فرکانس منبع تغذیه می چرخاند تنظیم می شود.
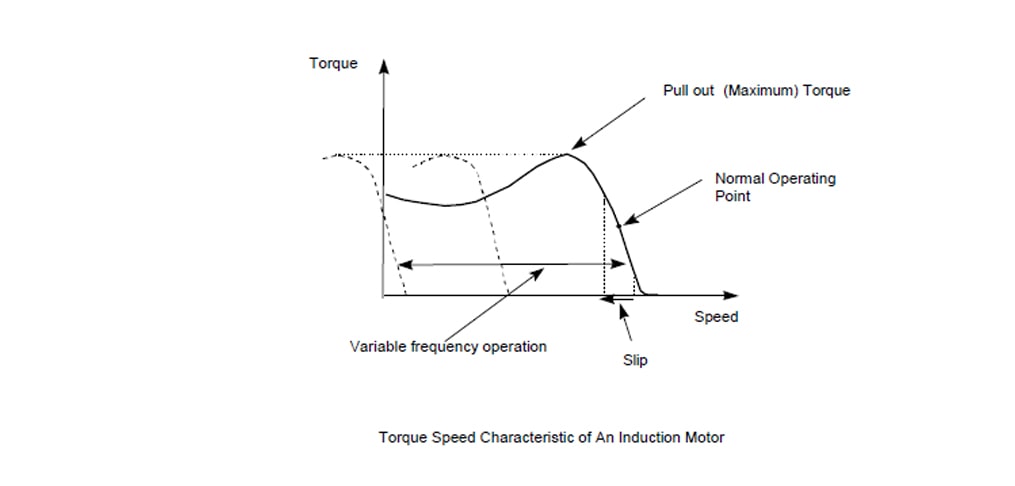
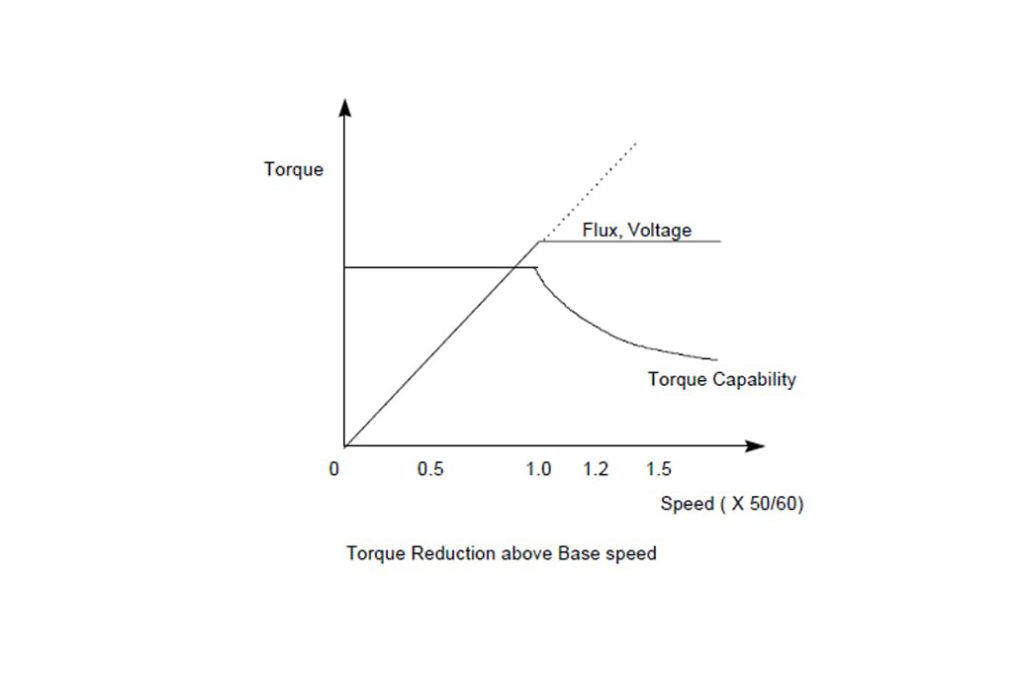
از این رو سرعت موتور بستگی به فرکانس اعمال شده، و ھمچنین به آرایش سیم پیچ و مقدار بار دارد.بنابراین برای کنترل سرعت موتور، کنترل فرکانس منبع ضروری است.اگر فرکانس کاھش یابد، ولتاژ باید کاھش یابد یا شار مغناطیسی بیش از حد زیاد شده و موتور اشباع می شود. بنابراین ولتاژ نیز باید کنترل شود. اگر فرکانس بیشتر از حد طبیعی افزایش یابد، به طور معمول ولتاژ بیشتری برای حفظ حداکثر شارنیاز است، این معمولا امکان پذیر نیست، بنابراین گشتاور کم در سرعت بالا در دسترس است.
بنابراین برای کنترل سرعت موتور AC استاندارد، فرکانس و ولتاژ مورد استفاده باید کنترل شود.اگر چھ کنترل ولتاژ و فرکانس ھا در این توان ھای بالا دشوار است،استفاده از یک موتور القایی استاندارد اجازه می دھد تا سیستم کنترل سرعت مقرون بصرفه ای ساخته شود. یک مبدل الکترونیکی که جریان مستقیم (DC) را به جریان متناوب (AC) تبدیل می کند به عنوان یک اینورتر شناخته می شود. کنترل کننده ھای سرعت الکترونیکی برای موتورھای AC معمولا با استفاده از یک یکسو کننده، منبع AC را به DC تبدیل میکنند ، و سپس آن را به یک فرکانس متغیر ، ولتاژ متغیر AC با استفاده از یکپل اینورتر تبدیل می کنند. این اتصال بین یکسو کننده و اینورتر DC link نامیده می شود. بلوک دیاگرام یک کنترل کننده سرعت (اغلب به نام یک اینورتر) در زیر نشان داده شده است:
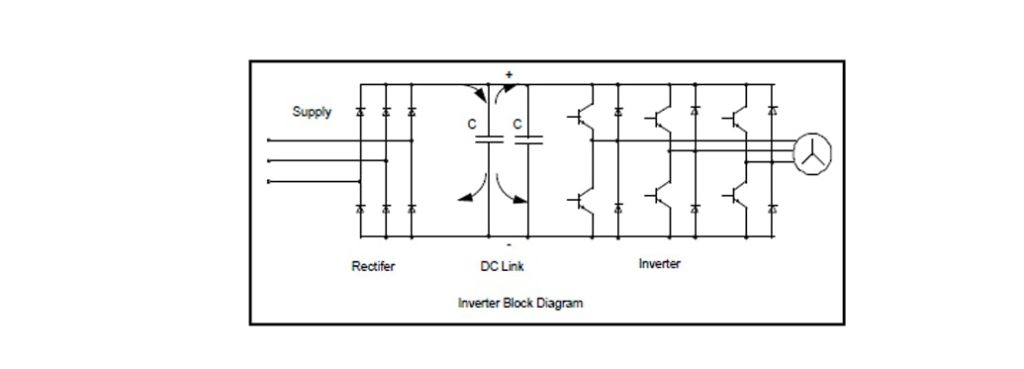
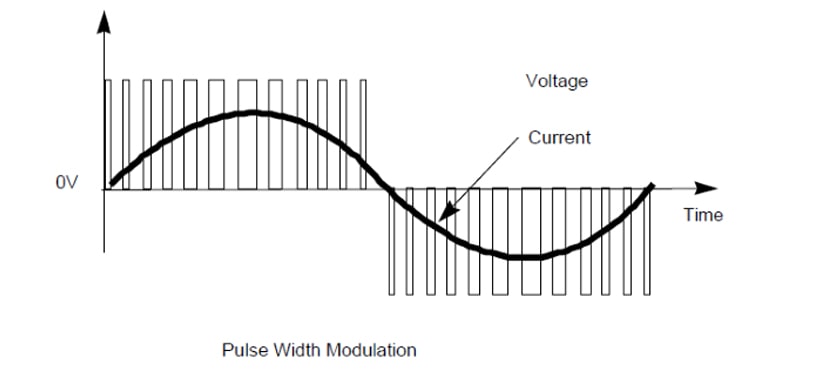
منبع تغذیه، که می تواند یک فاز (معمولا کم قدرت) یا سه فاز باشد، یک یکسو ساز تمام موج را تغذیه میکند که آن ھم خازن ھای DC link را تغذیه می کند. خازن ھاریپل ولتاژ را کاھش می دھند (مخصوصا برای تک فاز) و انرژی را برای وقفه ھای خیلی کوتاه فراھم می کنند. ولتاژ خازن کنترل نشده است و به پیک ولتاژ AC تغذیه بستگی دارد.ولتاژ DC با استفاده از مدولاسیون پھنای پالس (PWM) به AC تبدیل می شود.شکل موج مطلوب با سوییچ کردن ( روشن و خاموش کردن ) ترانزیستورھای IGBTخروجی در یک فرکانس ثابت (فرکانس سوئیچ ) ساخته می شود . با تغییر زمان روشن و خاموش شدن ترانزیستورھای IGBT، جریان مورد نظر می تواند تولید شود،اما ولتاژ خروجی ھنوز یک سری از پالس ھای موج مربعی است. مدولاسیون پھنای پالس در شکل زیر نشان داده شده است
جنبه ھای پیچیده زیادی در اینورتر ( درایو) ھا وجود دارد که در طراحی باید در نظر گرفته شود:
• سیستم کنترل برای محاسبه الزامات PWM بسیار پیچیده است و مدارھای مجتمع طراحی شده (ASIC) مورد نیاز است.
• بخش کنترل الکترونیکی اغلب به DC link متصل شده است که به منبع متصل است، بنابراین اتصالات کاربر، صفحه نمایش و غیره باید بصورت ایمن از این بخش مجزا شود.
• برای محافظت از اینورتر زیمنس و موتور زیمنس در اضافه بار و اتصال کوتاه، جریان خروجی باید دقیقا تحت نظارت باشد.
• در ابتدا روشن شدن، خازن DC link تخلیه می شود و جریان لحظه ای باید محدود شود، معمولا با استفاده از یک مقاومت که توسط یک رله پس از چند ثانیه بای پسمی شود.
• تمام اتصالات به اینورتر ( درایو )، به خصوص اتصالات کنترلی و منبع تغذیه، ممکن است اختلالات زیادی ایجاد کنند و باید با اجزای حفاظتی مناسب نصب شوند.
• یک منبع تغذیه داخلی با چندین ولتاژ خروجی متفاوت برای تامین بخش کنترل الکترونیکی مورد نیاز است.
• اینورتر، به ویژه IGBT ھا و دیودھای یکسو کننده، حرارت تولید می کنند که باید با استفاده از فن و صفحات ھیت سینک تخلیه شوند.
• ولتاژ خروجی PWM دارای بسیاری از ھارمونیک ھای فرکانس بالا (به علت سوئیچینگ سریع) است و می تواند منبع اصلی EMI باشد.
• یکسو کننده ورودی فقط در پیک شکل موج تغذیه جریان را ترسیم می کند، بنابراین جریان ورودی فاکتور شکل ضعیفی دارد (به عنوان مثال مقدار RMS می تواندبسیار زیاد باشد – این به این معنی نیست که اینورتر ناکارآمد است!)
یک درایو کاربردی باید برای سھولت استفاده و نصب طراحی شود. اینورترھای بزرگ معمولا برای ھر کاربرد طراحی شده یا مھندسی می شوند.